
2.4.5 无线通讯模块选择
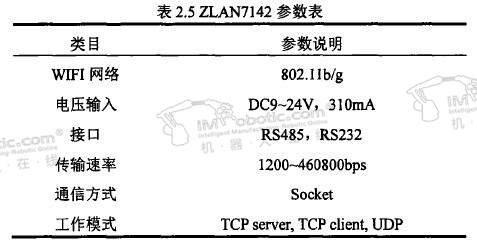
仓库搬运机器人在实际移动过程中需要接收仓库管理中心的控制指令。 同时,搬运机器人本身的信息通过一定的协议传输到仓库管理中心。 本文选择无线通信方式实现机器人与上位机之间的通信。 如图2.25所示,采用上海卓兰信息公司生产的ZLAN7142型号串口转换器来实现无线通信的目的。 ZLAN7142型号串口转换器电源工作电压为9~24V,波特率支持范围为1200~460800bps,有五种校验位模式可以使用,即None、奇校验、偶校验、Mark、Space。

ZLAN7142转换器参数如表2.5所示。 首先使用数据线连接RS485串口和转换器,然后选择转换器功能模式为Station模式,设置参数将转换器连接到路由器,最终实现与路由器之间高速数据转发的功能。控制板和上位机。
2.5 本章小结
本章首先结合物流行业搬运机器人的研究现状,根据实际需求对控制系统进行功能分析,列出仓储物流搬运机器人的参数表,明确机器人的通讯和行走方式; 其次,根据仓储物流的实际工作环境以及仓储搬运的功能需求,完成了潜藏机械结构的仓储搬运机器人的总体设计; 最终完成了相关核心部件的选型。
